arduino, eletrônica, robotica...
PROJETO QUADRUPEDE (iniciante)
Quatro Patas com 3 servos em cada uma , esse projeto foi meu primeiro projeto com robótica eu ainda sou leigo não tenho um a base forte nas áreas de eletrônica, mecatrônica tudo que sei eu li na internet e assisti vídeo aulas .
Gosto de compartilhar minhas ideias desse tipo de estudo com as pessoas acho que falta isso em nosso País estudo direciados como por exemplo robótica ,astronomia dentre muitas outras áreas que realmente são magnificas bom , vamos la vou mostrar para vocês como é simples a construção de uma robô vemos varias pessoas com seus hexapods ,drones e ficamos maravilhados pensando "aff "não consigo fazer isso mais eu sou prova que mesmo sem saber nada com o básico e possível começar .
Matérias Usados
*Chapa de acrílico:(não vou especificar o tamanho por que e possível fazer do tamanho que quiser basta ter servos potentes ) .
*12 Servos Motores .
Modelo : Tower pro 48g engrenagem Metal Servo MG995.
Torque:13kg (4.8v/cm).
Torque: 15kg(6.0v/cm).
* Alumínio: ( também não vou especificar tamanho isso vai ao seu critério) .
*Diversos: (Parafusos,porcas,furadeira,dremel,furadeira,tico-tico).
*Placa controladora : SSC-32 lynxmotion.
*Fonte 9V.

*SEGUE A BAIXO AS FOTOS DA MONTAGEM
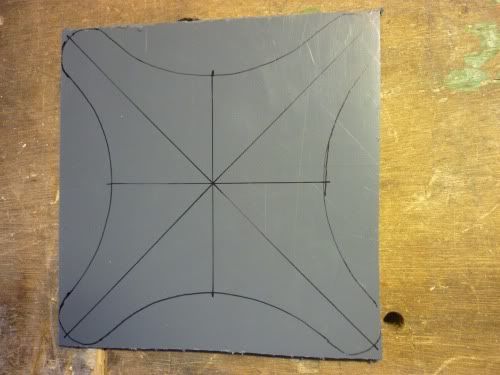
Essa chapa pode ser de Acrílico ou PVC.
(começando a fazer o protótipo do corpo)

Foi feito o corte nas quatro extremidades para colocar os motores como eu disse esse tamanho vai depender do motor que você vai usar .

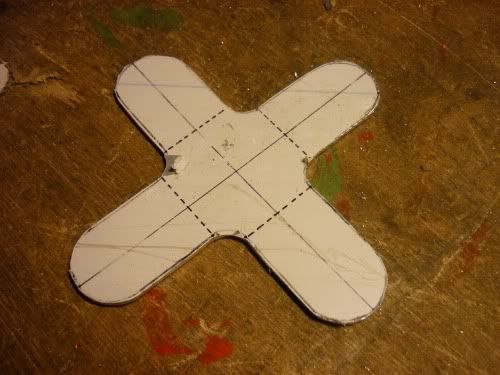
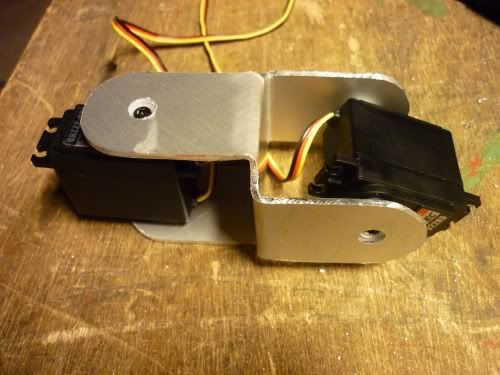
Começando a projetar a base das pernas .

A base esta sendo usada para juntar 2 servos em posições diferentes foi usado uma braçadeira para segurar eles .
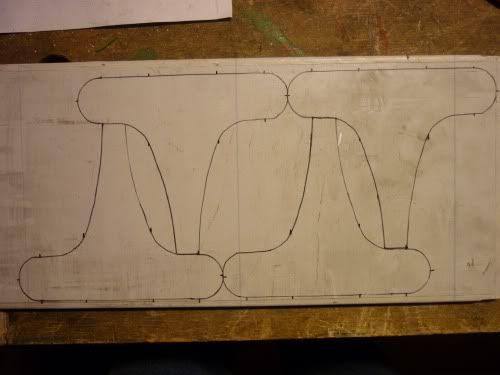
ADAPTAÇÃO DOS MOTORES
Os servos por padrão vem com rotação apenas de 1 lado para fazer essas pernas sera necessário fazer com que o servo gire seu corpo inteiro não apenas a engrenagem com isso foi necessário fazer uma adaptação para que o servo gire inteiro .

Essa foi a Peça usada você pode usar a sua criatividade e se quiser comprar essas adaptações prontas, elas vendem em sites de robótica especializados .


ARTICULAÇÃO DA PERNA
Para a perna foi feita uma peca em metal(Alumínio) para sua articulação.



CORPO COM SERVOS

CRIANDO A PARTE FINAL DA PATA DO ROBÔ



CORPO COM A PATA

CORPO COMPLETO

Vou postar o link dos videos da movimentação do robô .
Link Dos vídeos :
1° https://www.youtube.com/watch?v=RUx-if-oOUc&feature=player_embe...
2° https://www.youtube.com/watch?v=i_zYQLiC6v0&feature=player_embe...
3° https://www.youtube.com/watch?v=qFamnij1Oag&feature=player_embe...
4° https://www.youtube.com/watch?v=SjNyK5m0YXo&feature=player_embe...
5° https://www.youtube.com/watch?v=fnfPODE7QWk&feature=player_embe...
Respostas a este tópico
-
Permalink Responder até Alexandre em
-
Desculpem minha ignorancia, ainda to comecando com motores. Qual a razão/motivo/vantagem para se utilizar servos ao invés de motores de passo?
-
Permalink Responder até Murilo Lima Nogueira em
-
Acredito que o motivo seja o preço, a agilidade dos servos, o peso e a simplicidade do robô, pois se ele usasse motor de passo, o projeto seria o dobro ( ou o triplo ) do preço e de peso e também seria preciso os easy driver que também são caros no Brasil.
-
Permalink Responder até Jose carlos em
-
Ola
goste estou querendo montar uma desses mas com 6 patas
poderia me dar o contato para eu comprar uma placa dessa e me esclarecer umas duvidas sobre ela
por favor
obrigado
meu contato é zoowltar@hotmail.com
-
 Permalink Responder até Daniel Brotto em
Permalink Responder até Daniel Brotto em
-
Olá Diego, o que vou pedir pode ser um pouco demais, mas você poderia passar o código do robo, pois tenho problemas em definir a ordem dos passos e por ser um projeto parecido pode ajudar. Grato.
Meu contato: daniel_brotto@hotmail.com
-
Permalink Responder até Kelvin Stang Oenning em
-
Esse projeto ficou muito bom... tudo feito com material de qualidade, está de parabéns.
-
Permalink Responder até JOAO MARTINS DA SILVA em
-
MUITO BOM MESMO ESSE PROJETO,GOSTARIA DE SABER AS MEDIDAS DESSAS PEÇAS QUE PEGAM OS SERVOS,ALGUEM PODE ME AJUDAR?
-
Permalink Responder até José Gustavo Abreu Murta em
-
Encontre informações em :
http://letsmakerobots.com/robot/project/my-first-robot-quadruped-3-...
-
-
Ow, caramba! Bati o olho na primeira foto e pensei "o cara só montou um kit comprado, e tá falando que ele mesmo fez".
Daí baixei pra segunda foto e vi, você fez tudo mesmo! E ficou muito bom, com aspecto de fabricaćão profissional!
Tô chegando nisso, me faltam ferramentas e um espaćo melhor do que a sala improvisada da minha casa.
Parabéns, teu projeto tá perfeito!
- ‹ Anterior
- 1
- 2
- Próximo ›
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()