arduino, eletrônica, robotica...
Artigo: Controlador PID (Proporcional-Integral-Derivativo) - Parte 1-Introdução

Neste artigo (Parte 1 de 4) vamos falar sobre controladores PID (Proporcional-Integral-Derivativo).
Os controladores PID são controladores com feedback muito utilizados em automação industrial. Esses controladores calculam um erro entre o valor medido na saída e o valor desejado no processo. Assim o controlador tenta diminuir o erro que foi gerado pela saída, ajustando suas entradas.
O cálculo do controlador PID envolve três paramêtros: Proporcional, Integral e Derivativo.
A fórmula do PID é dado por:

Onde:
- u(t) é a saída em relação ao tempo
- e(t) é a entrada menos o erro em relação ao tempo
- Kp é a constante proporcional
- Ki é a constante integral
- Kd é a constante derivativa
Função Proporcional:

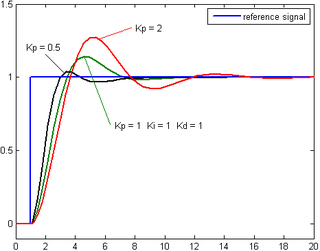
Essa função do controlador PID produz um valor na saída proporcional ao erro obtido na Realimentação. A resposta proporcional pode ser ajustada a partir da constante de ganho Kp. Quanto maior a constante Kp, maior será o ganho do erro e mais instável será o sistema. Mas se a constante Kp for muito pequeno, menor será o seu tempo de resposta. A figura abaixo mostra um gráfico com uma entrada (linha azul) e as saídas com Kp de vários valores:
Função Integral:

A função integral soma todos os erros instantâneos e a somatória é multiplicada pela constante Ki. A função integral do controlador PID acelera o movimento do processo até o ponto desejado e elimina o erro que ocorre na função anterior. Como a função soma dados instantâneos, o resultado do processo pode ultrapassar o ponto desejado. Essa consequência se chama "overshoot". A figura abaixo mostra um gráfico com uma entrada (linha azul) e as saídas com Ki de vários valores:

Função Derivativa:

A função derivativa retarda a taxa de variação de saída do controlador. Essa função diminui o "overshoot" da função anterior e melhora a estabilidade do controlador. Por outro lado, a função derivativa causa um retardo na resposta e é muito suscetível à ruídos. Isto acontece porque essa função amplifica o ruído e caso o ruído e o ganho Kd forem muito grandes, podem causar instabilidade no controlador. A figura abaixo mostra um gráfico com uma entrada (linha azul) e as saída geradas pela função:

Portanto para uma melhor estabilidade no sistema usamos o controlador PID que contém as três funções e dependendo das constantes podem melhorar ou piorar a estabilidade do sistema a ser controlado. Nos próximos artigos falaremos como implementar o controlador PID no Arduino e como ajustar as constantes para melhor estabilidade.
E é isso! Esperamos que tenha gostado! Se tiver dúvidas, poste aqui mesmo neste blog! Se tiver sugestões para tutoriais, clique aqui! Para ver outros tutoriais e projetos desenvolvidos pela equipe LdG e por outros garagistas, clique aqui e aqui, respectivamente! Até a próxima!
Referências:
Comentar
-
 Comentário de Hugo em 6 março 2017 às 19:56
Comentário de Hugo em 6 março 2017 às 19:56 -
Luís Bulek: "It is called either the manipulated variable (MV) or the control variable (CV)"
-
Comentário de Jefferson da Silva Almeida em 8 junho 2014 às 21:22
-
Isso é tudo o que eu queria!!!
-
Comentário de Jonatas Freitas em 25 março 2013 às 6:30
-
Mais didático impossível!
-
Comentário de Nadiel Fernandes Lima Maia em 24 março 2013 às 23:13
-
Nossa! Não entendi quase nada!!!
-
-
Luís:
MV: Já traduzindo, Variável manipulada. Variável sobre a qual o controlador atua para controlar o processo.
-
Comentário de Luís Bulek em 28 janeiro 2013 às 19:29
-
O que significa MV(t) ?
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()
Você precisa ser um membro de Laboratorio de Garagem (arduino, eletrônica, robotica, hacking) para adicionar comentários!
Entrar em Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)