arduino, eletrônica, robotica...
Big Easy Driver com Arduino e Nema 23
Fiz a ligação desse topico com o big easy driver. Porém quando acionei o chip saiu sua "alma". rsrs
Tenho outros aqui e gostaria de saber o que esta tendo de errado.
Respostas a este tópico
-
Permalink Responder até José Gustavo Abreu Murta em
-
Mostre como fez as conexões .
Fotos e desenhos .
Especifique quais placas, fontes e motores usou ,
-
Permalink Responder até Rafael Maia Gadelha em
-
Fiz conforme o tutorial: http://labdegaragem.com/profiles/blogs/tutorial-como-utilizar-o-big...
Alterei apenas os pinos step e dir, para funcionar no Grbl. coloquei no pino 2 e 5.
liguei outros 3 drivers nesse mesmo modelo os drivers ligam acende o led, o motor e o driver esquenta porem o motor não gira.
-
-
Motor conectado incorretamente !
Envie a foto do motor com a etiqueta, cores dos fios, etc
Ou então o link do seu motor.
-
-
-
-
Não utilizei os fios branco e preto. Coloquei laranja e azul em uma bobina e amarelo e vermelho na outra.
-
-
Ajuda ai né Rafael !
Mande as especificações do seu motor - fabricante, modelo ou link.
Eu ainda não tenho bola de cristal.
https://learn.adafruit.com/all-about-stepper-motors/types-of-steppers
http://www.linengineering.com/resources/wiring-connections/

-
-
o que tem na etiqueta e:
TYPE: 23km-c051-07v
N0 TOY04-01
minebeaco.ltd
-
-
A ligação dos fios esta correta.
Qual a tensão e corrente da fonte que esta usando ?
Leia isso:
http://www.guiacnc.com.br/eletronica/ligacao-do-motor-astrosyn-23km...
http://www.interinar.com/public_docs/23KM-K255U.pdf
-
-
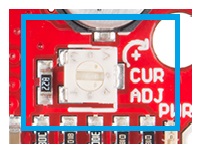
Atenção , essa placa Big Easy Driver tem um potenciometro para ajuste de corrente no motor.
Ajuste antes de usar ! Corrente = 0 a 2A
Ajuste para a mínima corrente e depois vá aumentando até o motor girar.
Se esquentar muito, é porque a corrente esta excessiva.
https://learn.sparkfun.com/tutorials/big-easy-driver-hookup-guide
-
-
-
Estou usando uma fonte 24v 6a. Uma fonte chaveada.
-
-
-
Ajustou a corrente ?
-
-
Fiz o ajuste no potenciômetro e nada, só o driver que esquenta demais.
Coloquei esse código no arduino para testar:
int stepPin = 3;
int dirPin=2;
// Variables will change:
int dirState = LOW;
int stepState =LOW;
long previousMicros = 0;long interval = 1000;
void setup() {
pinMode(dirPin, OUTPUT);
pinMode(stepPin, OUTPUT);
}
void loop()
{unsigned long currentMicros = micros();
if(currentMicros - previousMicros > interval) {
previousMicros = currentMicros;
if (stepState == LOW)
stepState = HIGH;
else
stepState = LOW;digitalWrite(stepPin, stepState);
}
}
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()