arduino, eletrônica, robotica...
ROBO HEXAPOD DE BAIXO CUSTO
Ola galera sou novo por aqui e resolvi postar minha experiencia com robotica Sou totalmente leigo ainda porem amante de ciencia ,astronomia e robotica . Estudante de Ciência da Computação . Bom vamos direto ao assunto eu estou fazendo meu primeiro robo ele e um bipede que encontrei um projeto faz um tempo e comecei a estudar sobre o assunto inicialmente mexi um pouco com arduino mais como eu queria um robo e uma placa controladora de servos potente comprei uma SCC-32 da lynxmotion uma placa que tem capacidade de controlar Ate 32 servos .
(SSC-32 Lynxmotion)
Vou postar agora as imagens e os matérias usados para a construção do robô.

(Todas as partes)
(Partes da Perna do robô)
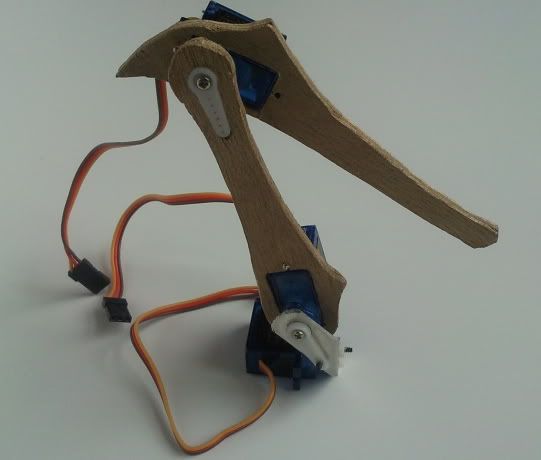

(Outra foto da perna)

(Servo usado e um Servo Hextronik HXT900 9GR)

(Adaptação para fixar o robô Ao Corpo)
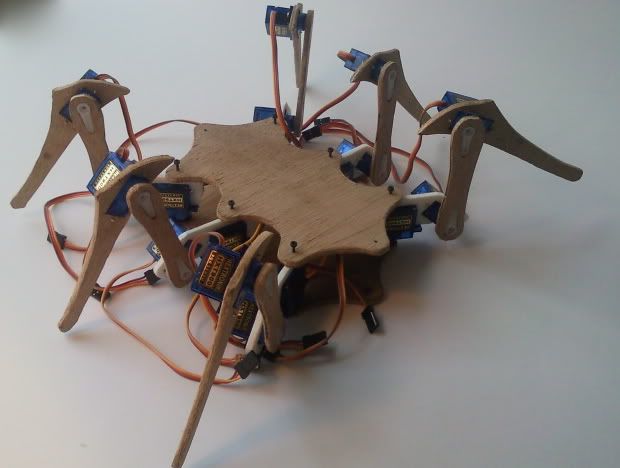
(Robô Quase Pronto )

Agora um pequeno vídeo do robô em funcionamento .
http://s1062.photobucket.com/albums/t485/diihpunk/?action=view&...
Bom Espero que gostem qualquer duvida só mandar Email . O modelo que estou fazendo sera em Acrílico em-breve posto fotos para vocês .
Respostas a este tópico
-
Permalink Responder até Diego Antonio da silva em
-
Parabens marcelo ta ficando legal sim .. bom minha primeira tentativa de fazer um hexapod foi com motores fracos desse modelo ai tive muito problemas com estabilidade pois sao bem fracos claro que mais baratos e tals vai ficar legal? sim claro , porem se puder comprar servos mais fortes vc pode fazer um robo quadrupede vou postar em breve meu robo aqui para voces verem .. estou usando a ssc-32 .. abraco
-
 Permalink Responder até Claudio Aparecido Tusikas em
Permalink Responder até Claudio Aparecido Tusikas em
-
Marcelo, Construi um hexapod igual ao seu, porém estou com dificuldades... Usei um arduino mega e esses mesmos servos HTX900... Porém, quando liguei todos os servos, eles ficaram loucos... Até seis servos (conectados no arduino) eles funcionam bem... Se eu conecto mais um servo, eles ficam descontrolados... Poderia me ajudar?
-
Permalink Responder até Eduardo Soares em
-
tive esse mesmo problema com um arduino uno,vc deve estar tentado usar a saida 5v do arduino para ligar os servos,tenta ligar eles externamente,ou ligar o arduino em uma bateria e depois usar a saida 5v
-
Permalink Responder até Claudio Aparecido Tusikas em
-
Eduardo, eu já observei isso... Coloquei baterias individuais para os servos e para o arduino. Porém, agora você me deu mais uma idéia. Tinha deixado um pack de 4 pilhas para todos os servos. Vou tentar usar um pack de pilhas para cada seis servos... (porque a partir do sétimo é que ocorre a vibração descontrolada).
-
Permalink Responder até Marcelo de Oliveira em
-
Claudio eu tbm estou com esse problema, e estou usando duas baterias de 900mAh em paralelo, e nao é sempre que ocorre isso, mas ocorre com mais de 15 servos
Se alguem tiver alguma solução compartilha ai :D
-
Permalink Responder até Eduardo Soares em
-
Ficou mt massa seu robo,também estou com vontade de fazer um parecido,em formato de formiga.Mas não sei que materiais usar,e queria saber como vc fez para para furar as pecas no formato das pecas do servos.
-
-
Cara, as peças eu cortei no CNC a laser, depois partir dos servos eu fui furando na furadeira, para poder parafusa-las
-
Permalink Responder até Eduardo Soares em
-
nao tenho uma CNC a disposição,nem sei como eu vou cortar minhas peças
-
-
Bom, eu fui em uma empresa que trabalha com acrílico, e eles cortaram pra mim, se vc fizer de madeira, como no tópico e tiver paciência pode cortar na serra simples
-
Permalink Responder até Eduardo Soares em
-
tenho 1 metro quadrado daquela madeira de porta retrato ele eh bem leve,deve servir
-
Permalink Responder até marcelo campos em
-
Amigo,
onde seria esta empresa que corta acrílico, é em SP ? poderia indicar ?
obrigado
-
-
cara, eu estou em maringá - parana, mas eh facil achar por ai tbm
Oh primeiro resultado do google para acrilicos são paulo
http://www.acrilicosavion.com.br/
Veja q eles tbm tem corte a laser!
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()