arduino, eletrônica, robotica...
ROBO HEXAPOD DE BAIXO CUSTO
Ola galera sou novo por aqui e resolvi postar minha experiencia com robotica Sou totalmente leigo ainda porem amante de ciencia ,astronomia e robotica . Estudante de Ciência da Computação . Bom vamos direto ao assunto eu estou fazendo meu primeiro robo ele e um bipede que encontrei um projeto faz um tempo e comecei a estudar sobre o assunto inicialmente mexi um pouco com arduino mais como eu queria um robo e uma placa controladora de servos potente comprei uma SCC-32 da lynxmotion uma placa que tem capacidade de controlar Ate 32 servos .
(SSC-32 Lynxmotion)
Vou postar agora as imagens e os matérias usados para a construção do robô.

(Todas as partes)
(Partes da Perna do robô)
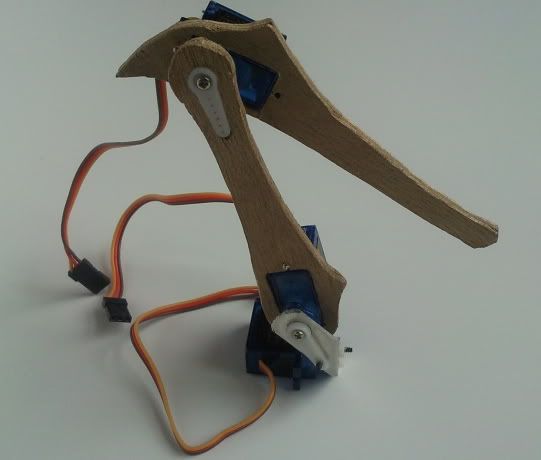

(Outra foto da perna)

(Servo usado e um Servo Hextronik HXT900 9GR)

(Adaptação para fixar o robô Ao Corpo)
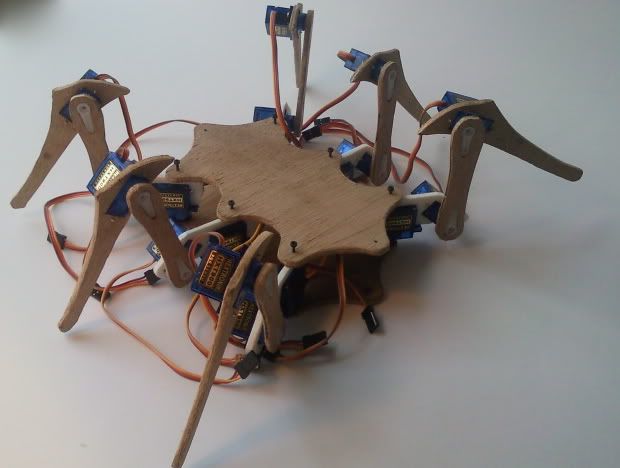
(Robô Quase Pronto )

Agora um pequeno vídeo do robô em funcionamento .
http://s1062.photobucket.com/albums/t485/diihpunk/?action=view&...
Bom Espero que gostem qualquer duvida só mandar Email . O modelo que estou fazendo sera em Acrílico em-breve posto fotos para vocês .
Respostas a este tópico
-
Permalink Responder até Daniel Washington em
-
Na HobbyKing.com, 5 deles saem por USD$17,44, já contando com o frete, o que dá uns R$31,80 no câmbio de hoje. Só não recomendo de cara porque a minha primeira encomenda com eles ainda não chegou, mas tá dentro do prazo.
A HobbyKing fala que os HXT900 dela são "tipo exportação" e são melhores do que os encontrados no mercado doméstico deles (Taiwan/Japão). Dois colegas de outro fóruma me confirmaram que isso procede, mas eu tô vendendo o mesmo peixe que eu comprei (e ainda nem provei).
-
Permalink Responder até Diego Antonio da silva em
-
preciso comprar 12 servos de 10 kg de torque , acho que vai custar caro heheh .
-
-
Valeu o apoio, Diego! Quanto à placa controladora, meu orientador é mais focado no MSP430 da Texas Instruments. Como o meu curso é Ciência da Computação, não tive quase nenhuma instrução em PICs ou outros microcontroladores, mas sempre me interessei pela área. Cheguei a montar um Arduino Severino, mas deu pau quando eu tava gravando o bootloader e nunca mais fiz nada com ele. Acho que essa parte do projeto vai ser por conta do orientador mesmo, mas qualquer dúvida, eu conto com você e outros garagistas pra me darem uma força!
Falando de placas, você ou alguém aqui já teve alguma experiência com a Pololu Mini Maestro 24? Me pareceu outra opção interessante pelo espaço ocupado, que tá a preço de ouro no nosso hexa: a SSC-32 tem 7,5cm x 6cm, enquanto a Pololu tem menos de 6cm x 3cm. Pena que o preço é um pouco mais salgado e o número máximo de servos é menor, mas só vamos usar 18 pras pernas, talvez 20 pra incluir uma câmera ou sensor ultrassônico. Vamos ver no que vai dar.
Os servos eu já encomendei 3 Hitec HS-422 e outros dois standard xingling da HobbyKing, um comum com 3,8kg*cm de torque e outro com engrenagens de metal e torque de 9kg*cm. Os Hitec são de boa procedência, mas os outros eu comprei pra ver se presta mesmo. Assim que eles chegarem (40 dias?) eu posto um review ou algo assim aqui. Abraços!
-
Permalink Responder até Emerson Gonçalves da Silva em
-
Assim como vc estou começando...
Fiz um projeto Hexapod utilizando a plataforma Arduino Mega.Andou mas não ficou muito bom.
Então resolvi comprar a eletrônica do Hexapod Phoenix, mas pretendo continuar melhorando o que eu fiz
coma plataforma Arduino por que a ideia é fazer um de baixo custo.
Boa sorte no seu projeto
- Anexos
-
-
 DSC06888.JPG, 2.6 MB
DSC06888.JPG, 2.6 MB -
DSC06879.JPG, 2.7 MB
-
DSC06880.JPG, 2.6 MB
-
-
-
Emerson, boa tarde! As imagens do seu hexa são legais! Como é o desempenho dos servos TowerPro MG995? Eles são bastante baratos e eu fico tentado a comprar alguns. Numa resposta anterior minha, eu comentei que havia encomendado alguns, mas eles ficaram retidos na receita federal devido à uma "investigação em andamento", aparentemente sobre a HobbyKing. Pelo menos o PayPal me devolveu o dinheiro.
Fala mais sobre ele, se tiver uns vídeos, posta também! Eu pretendo comprar uma SSC-32 pro meu hexa, já que me explicaram que o Arduino passa aperto pra controlar todos os servos ao mesmo tempo, mesmo o Mega. A razão é que a SSC possui multiplexadores analógicos pras saídas dos servos. Mas o que você não gostou nele? A movimentação ficou irregular? Se for isso, vc acha que é por causa dos servos ou do microcontrolador? Qual o peso total do hexa?
Desculpa as várias perguntas, mas como eu tô tentando montar um tb, é interessante trocar experiências. E apesar de existirem comunidades na internet sobre o tema, eles não convivem com a nossa realidade, onde é difícil encontrar servos de boa procedência e a importação não é nada facilitada, como ocorreu comigo.
Em tempo: a SSC-32 é open-source e os arquivos do projeto estão disponíveis na net, assim como o Arduino. Acredito que não é impossível montar uma (eu já montei um Arduino Severino e usei somente ele até pouco tempo atrás), mas o projeto é bem mais complexo e ela usa alguns componentes SMD, que eu não tenho experiência. Como a intenção é manter o custo baixo, vc pode fazer uma, se estiver disposto.
Abraços!
-
-
Tudo bom Daniel?
Os servos TowerPro MG995 não são tão precisos também não são digitais mas dá um resultado satisfatório.
O grande problema que eu tive com esses servos é que eles estragam muito, acredito que que é devido ao circuito interno,que não é lá dos melhores,e que sofre muita interferência.Parece que lançaram uma versão
melhorada TowerPro MG996R que vc pode comprar pelo mercado livre... ainda não comprei.
Eu comprei a placa SSC-32 só que vc tem que ter o software Lynxmotion Sequencer Visual.O foto da placa SSC-32 ter multiplexadores não a faz melhor que o arduino é sim a utilização de uma memoria externa e um software dedicado ao único proposito pelo qual ele foi criado "fazer robôs bípedes,Hexapoid, quadrúpedes,braços mecânicos.... Vc pode implementar multiplexadores no Arduino Uno é ter varias saídas quanto a SSC-32.A movimentação precisa de um ciclo de máquina mais rápido que o arduino
pode oferecer,porem o problema tá no programa que tem de ser mais apurado.
Esse da foto foi feito em alumínio e a mão mesmo utilizando ferramentas manuais como arco e serra,lima,furadeira... foi baseado em alguns que eu vi na rede.Não fiz medida de peso,então não sei o quanto ele pesa.O outro que eu estou fazendo agora vai ter partes em madeira MDF o que eu acredito que vai reduzir ainda mais o que já não ere tão pesado assim.
No site da LYNXMOTION vc tem bom suporte e ate exemplos prontos.Eu estou me familiarizando
com os progarmas escritos pelo Zenta e pelo Aka que fez o Phoenix V2.0 mas tô começando falta muita coisa é ideia pra organizar.
Abraços
-
-
Emerson, valeu pelas respostas! Uma última pergunta: onde você comprou a SSC-32? A Lynxmotion quer cobrar 4 vezes o valor dela só de frete pra enviar pra cá... Cheguei a olhar em outras lojas de materiais de robótica lá fora, mas se houver alguma aqui no Brasil me agilizaria.
Abraços!
-
-
É Daniel essa é a parte ruim da coisa toda... Mas se vc analisar vai ver que não é tão salgado em relação ao o que temos disponíveis ex. uma placa Arduino Mega 2560 Rev3 ta em torno de R$200,00 é ainda fica faltando o SHILD pra facilitar a vida da gente...Outro ex. uma placa Controlador de 24 Servos via USB - Mini Maestro tá em torno de R$ 190,00.Bem... isso é muito relativo.Eu comprei a SSC-32 através Anacom Eletrônica Ltda.Dá uma olhada no site da LYXMOTON na opção distribuidores... ai é só vc entrar em contato com eles.
Até mais!
-
-
eai Daniel eu comprei a SSC-32 por 160 reais no siet da RObocore. e brasileira e comprei e chegou rapidao .. precisar de mais alguma dicas me avisa eu comprei tambem motores com engrenagem de metal .. bem resistente com Torque de ate 16kg por um preco bem acessivel e o cara entrega rapidao eu comprei 18 motores desse.. bom qualquer coisa manda mensagem ai ..
-
Permalink Responder até Marcelo de Oliveira em
-
Eaew galera, qndo vi esse post me deu vontade de fazer um tbm, entao soh pra compartilha com vocês, ainda estou termiando de programar ele, mas esta ficando assim kkk abraços!
-
-
Marcelo, tá ficando doido! Eu vi pela imagem que vc tá usando um Arduino Mega pra controlar o grupo de servos HXT900, procede? Como que é o desempenho desses servos? O Mega tá difícil de programar pra tantos servos? Me diz aí o que vc tem feito...
No caso do nosso, nós vamos usar uma SSC-32 pra controlar os servos mandando os comandos pela serial do PC, pelo menos inicialmente. Depois, devemos colocar um BlueSMIRF ou algo similar pra tunelar a serial via bluetooth. Só estamos aguardando a chegada dos componentes pra colocar em prática. Optamos também por usar as peças do Servo Erector Set da Lynxmotion pra construir a parte física, exceto pelo corpo central, que vai ser uma peça de PVC expandido.
Vale lembrar também que tem muito material de pesquisa nos fóruns da Lynxmotion, Trossen Robotics e MicroMagic Systems. Neles você encontra algoritmos de controle de andadura (nosso pesadelo atual), técnicas de construção, recomendações, etc. Vale a pena dedicar um tempo lá.
Abraços!!!
-
-
Daniel, então eu to usando o mega sim, mas soh por enquanto, eu comprei esse servo controller aki:
http://www.ebay.com/itm/32-Channel-Servo-Controller-Board-UART-Cont...
soh que comprei esses dias e pelo jeito ainda vai demora um pouco kkkk
mas o desempenho, não estão ótimo mas esta ate q bem, fiz um driver pra da uma melhorada, mas ta indo.
a programação ta um pouco complicado mesmo, mas vou tentando enquanto não chega o controlador,
se caso conseguir fazer ele andar com o mega, posto aqui o codigo pra verem.
e valeu as dicas, estou procurando mesmo algo para me ajudar na andadura.
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()