arduino, eletrônica, robotica...

Problema com ponte H
Estou utilizando um módulo ponte H para o projeto de um robô. O problema é o seguinte para o controle da direção dos motores eu uso dois pinos digitais e a velocidade eu controlo com pwm, porém quando eu seto a direção como HIGH a potência máxima do motor passa a ser igual a zero e quando a direção é LOW a potência máxima é 255. As funções abaixo funcionam porém acho estranho essa inversão de valores.
void frente(){
digitalWrite(dir1Pin,HIGH);
analogWrite(pot1Pin,0);
}
void tras(){
digitalWrite(dir1Pin,LOW);
analogWrite(pot1Pin,255);
}
void parar(){
digitalWrite(dir1Pin,HIGH);
analogWrite(pot1Pin,255);
}
As respostas para este tópico estão encerradas.
Respostas a este tópico
-
Permalink Responder até Marcelo Mosczynski em
-
Por acaso não tem algum jumper? parece que a lógica ai tá PNP e não NPN.
-
-
 Permalink Responder até João Victor em
Permalink Responder até João Victor em
-
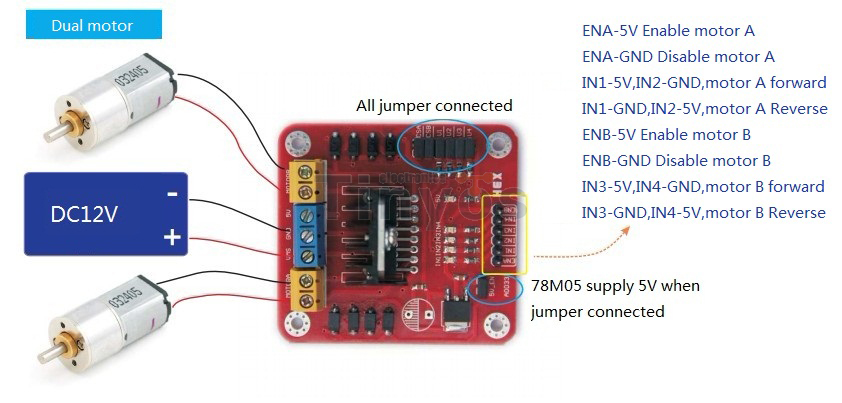
O módulo possui dois jumpers que ativam ou desativam as saídas dos motores e um jumper que ativa ou desativa a alimentação de 5v. Esse é o módulo
-
-
Permalink Responder até José Gustavo Abreu Murta em
-
Envie um link de referência desse shield.
Diagrama, sketch, etc
-
-
Permalink Responder até João Victor em
-
-
-
-
O problema é que em vez de usar 3 pinos, você está usando apenas dois.
Você precisa usar o ENA + os IN1 e IN2
Quando colocar IN1 para HIGH coloca o IN2 para LOW e ele avança
Quando colocar IN1 para LOW e colocar o IN2 para HIGH ele retrocedeMudando o PWM apenas em um PINO você está apenas indo ou parando, não controlando se vai para frente ou para trás
-
-
Permalink Responder até João Victor em
-
No meu caso os pinos ENA ENB são controlados através de jumpers eles já estão ativados por pardrão. O problema e que quando o motor gira para frente(HIGH) a velocidade máxima é o 0 com pwm.
-
-
-
Mas quantas conexões tem no seu esquema? Coloca uma foto da montagem.
-
-
-
As fotos que enviou são diferentes,
Afinal qual é esse driver?
Tem o link dele?
-
-
Permalink Responder até João Victor em
-
O driver é o da primeira foto, a única diferença é que o segundo possui os os pinos que ativam e desativam o motor.
-
-
Permalink Responder até Flavio Andrade em
-
amigo, a questao eh q esta sendo usado apenas um pino de PWM para controlar a velocidade, colocando LOW de um lado e 0-255 do outro, aumenta a velocidade, e colocando HIGH de um lado e 0-255 do outro, diminui a velocidade, o fato q vc disse q esta invertido pela sua logica, sao apenas os fios do motor...
-
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()