arduino, eletrônica, robotica...

Motores de Passo X Servo com Encoders
Ola.
Sabemos que quando se trata de precisão devemos usar motores de passo, poisa sabemos que o erro não se propaga de um passo para outro e ele tem uma precisão impressionante na posição, inclusive pode-se usar micropassos, que nada mais é do que deixar o motor em uma posição intermediaria entre um passo e outro.
Venho vendo em varios projetos de precisão que são usados servos com encoders e que oferecem uma precisão, se não igual, muito parecida, com o do motor de passo e que tem uma serie de vantagem em relação ao torque e velocidade melhores que o motor de passo.
Estou tentando entender o funcionamento basico desse sistema de encoder para determinar a posição em graus exata que esta o eixo do motor.
Pelo que entendi nesse sistema no Rotary Encoders é usado algo parecido com o esquema em embaixo onde é usado um emissor e receptor de luz que detecta, atraves de uma mascara, quando a luz é recebida ou não e ele sabe a posição em que esta.
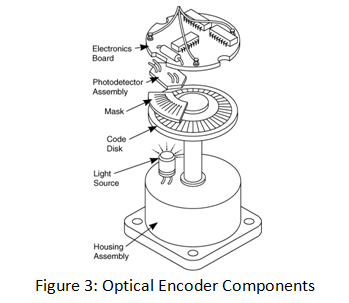
Agora por mais furos que tenha esse disco, não deve ter tanta precisão no posicionamento quanto um motor de passo em full step, imagine em micropassos.
Então a minha pergunta : como que eles fazem esses servos para ter tanta precisão assim ao ponto de substituir motores de passo em diversas aplicações que exigem precisão.
Abaixo a img de um servo com seu conector, podemos ver que ele tem muitos mais conectores que um servo comum e mais que um stepper, alguem sabe se esse tipo de servo tem que ser conectado em alguma placa controladora especifica que faça o "encoder" e o controle do servo ?

[]´s
Jota
Respostas a este tópico
-
Permalink Responder até Joe Nova em
-
Olá Jota
Boa pergunta, existem dois tipos básicos de encoders, o Incremental e o absoluto.
O incremental normalmente é instalado no eixo do motor e o absoluto no eixo de saída do sistema de posicionamento.
Não é necessário utilizar os dois, normalmente ou um ou outro.
A resolução do encoder incremental é definida pelo no. de ranhuras do disco, sendo assim o no. de pulsos por revolução PPR, já o absoluto pelo no. de bits relacionados a um giro completo, por exemplo um encoder absoluto de 12 bits divide um circulo em 4095 partes.
Daí vem a maior precisão em relação aos motores de passo. Considerando que as folgas mecanicas dos redutores sejam menores do que a resolução do encoder.
A tecnologia dos encoders magnéticos vem tomando o espaço dos caros encoders opticos.
Espero te-lo ajudado de alguma forma.
abços
-
 Permalink Responder até Jota em
Permalink Responder até Jota em
-
Muito boa resposta Joe...
Parabens, deve ter estudado bastante o assunto.
4095 partes com precisão ?
Isso é um absurdo, muito melhor que um motor de passo em micropasso de 1/16.
Então devemos pensar que o melhor seria mesmo um servo com encoder por diversas razoes, claro que ele é bem mais caso que um motor de passo.
E pelo que entendi os servos tem uma vantagem que o motor de passo nao tem :
Vc pode girar o eixo com a mão e ele vai te dizer exatamente a posição do eixo, coisa que no stepper se perde.
Seria o caso de desligar a maquina, andar com ela manualmente e voltar a ligar, o stepper não tem como saber onde ele esta, ja o servo vai saber justamente pela ranhura em que esta o disco, é isso ?
[]´s
Jota
-
-
Olá Jota
Sim estou estudando os servos em sistemas de posicionamento a 4 anos e ainda falta muito para apreender os sistemas não param de evoluir.
Sim, os servos são mais precisos mais velozes e mais caros tb. Porém em determinadas aplicações são insubistituiveis.
Já os motores de passo são mais em conta para aplicações de baixa velocidade e torque e produção em larga escala para a eletronica de consumo, tipo impressoras.
A diferença na eletronica de controle é que no motor de passo a malha de controle esta aberta é um controle do tipo liga desliga.
Já no servo motor o sistema para ter precisão necessita estar em malha fechada, ou seja a saída do sistema deve estar conectada a entrada. Ai precisa de um filtro do tipo P.I.D para não entrar em oscilação.
O encoder absoluto possui um codificador interno de posição pode ser um disco com anéis em semi circulos no optico ou uma matrix de pastilhas de efeito hall nos magnéticos.
para cada posição angular da um numero na saída. Se for um encoder de 2 bits dará um numero entre 1 e 4 .
postei um esquema que desenvolvi aqui
http://labdegaragem.com/group/matematica-com-arduino/forum/topics/p...
Abços
-
Permalink Responder até Jota em
-
É facil de achar controladora de servo tão facilmente quanto controladora de motor de passo ?
Imagino que o servo tenha esse sistema de discos de posicionamento, mas deve existir uma controladora externa que processe essa informação de posição do disco e reajuste ou informe a posição se for preciso, é isso ?
[]´s
Jota
-
-
Olá Jota
Sim eu existem muitos fabricantes de drives para servo motores, e existem muitos modelos de encoders tb, com diferentes protocolos de comunicação que vão de analógicos a serial SSI e EIA 485. Existem fabricantes de encoders como a AVAGO, que produzem os discos e as cabeças leitoras , para os integradores.
os arduinos dão excelentes controladores de servomotores, existem Libs, para isto.
Abços
Bem-vindo a
Laboratorio de Garagem (arduino, eletrônica, robotica, hacking)
© 2024 Criado por Marcelo Rodrigues.
Ativado por
![]()